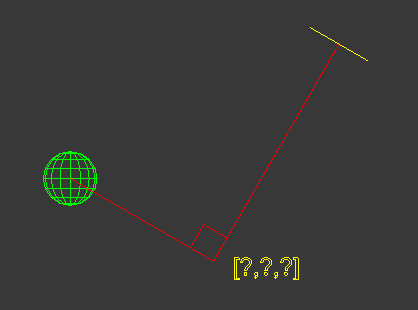
In this situation I’ve given a normal, a center position for the normal and I want to align the sphere along the vector of the other object, based on the normal. How would I do this?
/* Test Scene Setup */
delete objects
pln = plane width:5 length:5 pos:[10,10,10] wirecolor:yellow
rotate pln (angleaxis 30 [1,0,0])
s1 = sphere pos:[25,30,0] wirecolor:red radius:2
s2 = sphere pos:[32,18,7] wirecolor:green radius:1
center = pln.pos
normal = pln.transform.row3
Step 1: How to find this point?
1 – Get the distance between the big sphere and the yellow box.
2 – place the big sphere on the path(vector/direction) between the small sphere and the yellow box at the calcualted distance. No need of rotation.
–1 – Get the distance between the big sphere and the yellow box.
–2 – place the big sphere on the path(vector/direction) between the small sphere and the yellow box at the calcualted distance.
/* Test Scene Setup */
delete objects
clearlistener()
pln = plane width:5 length:5 pos:[10,10,10] wirecolor:yellow
rotate pln (angleaxis 30 [1,0,0])
s1 = sphere pos:[25,30,0] wirecolor:red radius:2
s2 = sphere pos:[32,18,7] wirecolor:green radius:1
center = pln.pos
normal = pln.transform.row3
-- step 1: Find Distance
dist = distance pln.pos s1.pos
-- step 2: vector dir
dir = normalize (s1.pos - pln.pos) -- not used
fn GetPlacement startPos endPos =
(
startPos+(normalize (endPos-startPos)) * dist
)
p = GetPlacement pln.pos s2.pos
newS = sphere pos:p wirecolor:blue radius:1
Is it works or not?
I don’t have 3dsMax to test it.
No it doesn’t appear to work as expected. It just places the object along the vector, which doesn’t create the desired result as the image shows above.
If you want the big sphere to be aligned to the path using the Normal of the yellow box try this:
- create a matrix using the normal of the yellow object(Z of the matrix match the normal)
- project the spheres on the XY planne of that matrix
- measure the distnace between projected point of the big sphere and place it(on tne XY plane) or rotate id as you need.
your solution makes sense but im only familiar doing the first part. could you show how to do the rest?
This have to works, but for some reason this
newS1pos = stPos + (dist * dir)
not gives the point along the vector pln-s2.
(
/* Test Scene Setup */
-- delete objects
-- pln = plane width:5 length:5 pos:[10,10,10] wirecolor:yellow
-- rotate pln (angleaxis 30 [1,0,0])
-- s1 = sphere pos:[25,30,0] wirecolor:red radius:2
-- s2 = sphere pos:[32,18,7] wirecolor:green radius:1
-- center = pln.pos
-- normal = pln.transform.row3
pln = $Plane001
s1 = $Sphere001
s2 = $Sphere002
function PointPlaneProj pA pB pC pD =
(
-- find the point on the plane ABC which is the projection of the point D
local nABC=normalize (cross (pB-pA) (pC-pA))
pD+((dot (pA-pD) nABC)*nABC)
)
-- "create the matrix"
tmpMat = matrixFromNormal (pln.dir)
tmpMat[4] = pln.pos
in coordsys tmpMat
(
stPos = [0,0,0]
projPosS1 = PointPlaneProj [0,0,0] [10,0,0] [0,10,0] s1.pos
point pos:projPosS1
projPosS2 = PointPlaneProj [0,0,0] [10,0,0] [0,10,0] s2.pos
point pos:projPosS2
dir = normalize (projPosS2 - stPos)
a = point pos:stPos dir:dir wirecolor:yellow
dist = projPosS1 - stPos
newS1pos = stPos + (dist * dir)
point pos:newS1pos wirecolor:green
s1projPosDist = distance s1.pos projPosS1
newS1pos.z -= s1projPosDist
box pos:newS1pos
)
)
Yeah this is surely a tricky one.
I’m wondering if there is an easier approach to the solution we are overlooking by chance… I’m still trying to find a solution here.